
В процессе разработки и улучшения систем управления, одной из ключевых задач является настройка регулятора для достижения оптимальной работы системы. Правильно сконфигурированный регулятор позволяет поддерживать стабильность и точность в управлении процессом, а также минимизировать время отклика системы на изменения внешних факторов. В этом разделе мы рассмотрим основные принципы и методы настройки регулятора для достижения оптимальной производительности системы управления.
Оптимальная работа системы управления зависит от множества факторов, таких как тип и структура системы, требуемая точность управления, динамические свойства объекта управления и др. В контексте данного раздела, мы фокусируемся на настройке регулятора, который играет ключевую роль в поддержании стабильности и точности процесса управления. Мы рассмотрим принципы работы регулятора и его компоненты, а также приведем практические примеры настройки регулятора для различных типов систем управления.
Важным и неотъемлемым компонентом регулятора является ПИД-алгоритм. Этот алгоритм основан на принципах пропорционального, интегрального и дифференциального управления. Пропорциональная составляющая обеспечивает реакцию на текущее отклонение системы от желаемого значения. Интегральная составляющая позволяет компенсировать накопившуюся ошибку управления в прошлом, а дифференциальная составляющая учитывает скорость изменения значения ошибки. Взаимодействие этих трех компонент позволяет регулятору более точно и стабильно управлять системой.
Основы оптимизации работы устройств при помощи ПИД регулирования
В данном разделе мы рассмотрим основные принципы настройки регулятора для достижения оптимальной работы электрических устройств. Используя соответствующие параметры, мы можем улучшить стабильность и точность работы системы, а также снизить влияние внешних возмущений.
Подбор коэффициентов
Один из важных этапов настройки ПИД-регулятора – подбор коэффициентов пропорциональности, интегральности и дифференцирования. Параметры выбираются в зависимости от типа и особенностей устройства, а также требований к его работе. Коэффициент пропорциональности отвечает за чувствительность системы к ошибкам, коэффициент интегральности обеспечивает устранение постоянной ошибки, а коэффициент дифференцирования гасит колебания системы.
Метод тишины
Для настройки ПИД-регулятора можно использовать метод тишины. Он заключается в установлении нулевых коэффициентов интегральности и дифференцирования, а затем постепенном увеличении коэффициента пропорциональности до момента, когда система начинает колебаться. При этом коэффициент дифференцирования задают таким образом, чтобы колебания были минимальными.
Проверка реакции на возмущение
Для оптимальной настройки ПИД-регулятора необходимо проверить его реакцию на возмущение. В процессе опытов стоит измерять и регистрировать реакцию системы на заданные изменения. Корректировка коэффициентов позволит сделать систему более стабильной и устойчивой к непредвиденным факторам.
Использование экспериментальных данных
Для настройки ПИД-регулятора можно использовать экспериментальные данные, полученные при работе устройства в реальных условиях. Это позволяет учесть все особенности и факторы, влияющие на работу системы и подобрать оптимальные коэффициенты.
В результате настройки ПИД регулятора для электрических устройств становится возможным достичь улучшенной точности, устойчивости и эффективности работы системы.
К принципу активного управления сигналом

Пропорциональный элемент обеспечивает регулирование уровня управляющего сигнала пропорционально отклонению от требуемого значения. Интегративный элемент рассчитывает ошибку управления на основе накопления проинтегрированного отклонения со временем. Дифференцирующий элемент использует скорость изменения отклонения для предсказания будущих изменений и применяет корректировку к управляющему сигналу.
В совокупности эти три элемента дают возможность достижения оптимальной точности, стабильности и отзывчивости регулирования различных процессов. ПИД регулятор применяется в самых разных областях, от промышленности до робототехники и регулирования температуры. С его помощью можно эффективно контролировать процессы с внешними воздействиями и достичь требуемого значения с минимальными отклонениями.
| Пропорциональность | Коэффициент пропорциональности устанавливает прямую зависимость между отклонением и управляющим сигналом. Большой коэффициент может привести к быстрой реакции системы, но может вызывать колебания и нестабильность. Малый коэффициент обеспечивает стабильность, но может замедлить реакцию. |
| Интегративность | Интегративный элемент аккумулирует проинтегрированное отклонение со временем и использует его для корректировки управляющего сигнала. Это позволяет преодолеть статическую ошибку управления и обеспечить точное достижение требуемого значения после некоторого времени. |
| Дифференцирование | Дифференцирующий элемент предсказывает будущее изменение отклонения, а затем применяет корректировку к управляющему сигналу на основе этой информации. Это позволяет системе быстро реагировать на изменения и предотвращать их возможные нежелательные эффекты. |
Понимание работы управляющего механизма

В данном разделе рассматривается сущность и принцип действия основного элемента системы автоматического управления, обеспечивающего стабильность и точность регулирования процесса. Фокус делается на задачах, которые решает данный механизм, а также на его основных характеристиках, необходимых для эффективной работы.
Абзац 2.
Абзац 3.
Принцип работы ПИД регулятора: удержание оптимального равновесия в системе управления
Разберемся теперь, как устроен и как функционирует ПИД регулятор. Задача этого регулятора заключается в поддержании оптимального равновесия в системе управления, обеспечивая точность и стабильность процесса в соответствии с заданными параметрами. Он призван найти баланс между скоростью достижения желаемого значения и минимизацией возникающих ошибок.
Уникальность ПИД регулятора заключается в его возможности адаптироваться к изменяющимся условиям и автоматически регулировать параметры процесса. Первый компонент регулятора — пропорциональный — отвечает за мгновенную реакцию на изменения и устанавливает пропорциональную связь между ошибкой и управляющим воздействием. Он гарантирует быструю и точную коррекцию величины ошибки.
Второй компонент — интегральный — накапливает историю ошибок и позволяет компенсировать постоянную составляющую ошибки. Он гарантирует, что система будет стремиться к устранению остаточной ошибки и достижению точного значения. Также он усиливает действие пропорционального компонента.
Третий компонент — дифференциальный — предсказывает будущее изменение ошибки и сглаживает реакцию системы. Он уменьшает подаваемое управляющее воздействие в случае быстрого изменения ошибки, что способствует предотвращению перерегулирования и повышению стабильности системы. Вместе эти три компонента создают эффективную систему управления, способную адаптироваться к различным условиям и поддерживать оптимальное равновесие.
Шаги для достижения эффективного управления системой с использованием регулирования PID
- Анализ системы и определение управляемых параметров
- Выбор оптимального типа регулятора и его параметров
- Инициализация и настройка начальных значений параметров регулятора
- Проведение экспериментов для определения оптимальных значений коэффициентов
- Определение диапазона разрешенных значений параметров регулятора
- Проверка и анализ работы системы при различных условиях и возмущениях
- Оптимизация настроек регулятора для достижения желаемых результатов
Каждый из этих шагов играет важную роль в оптимизации работы регулятора и достижении требуемых параметров системы. Грамотная настройка регулятора ПИД позволяет достичь эффективного управления, улучшить стабильность и точность контроля, а также минимизировать воздействие возмущений на работу системы. При выполнении этих шагов необходимо использовать аналитические и экспериментальные методы, проводить детальный анализ данных и постоянно следить за работой системы для достижения оптимальных результатов.
Подбор коэффициентов пропорциональности, интегральной и дифференциальной составляющих
Один из важных этапов процесса оптимизации работы автоматического регулятора связан с подбором коэффициентов, отвечающих за пропорциональность, интегральность и дифференциальность регулирования.
Пропорциональный коэффициент определяет зависимость между ошибкой регулирования и управляющим воздействием. Он позволяет контролировать скорость и точность достижения заданного значения. Правильный выбор этого коэффициента важен для избежания перерегулирований и подавления колебаний системы.
Интегральный коэффициент задает меру суммирования кумулятивной ошибки регулирования и компенсации ее влияния на управляющий сигнал. Он играет роль в устранении устойчивых статических ошибок, но может вызвать интегральные колебания или запаздывание реакции системы.
Дифференциальный коэффициент отвечает за реакцию регулятора на изменение ошибки регулирования. Он позволяет контролировать скорость изменения управляющего сигнала, что влияет на динамику системы. Неправильная настройка этого коэффициента может вызвать нестабильность и усиление шумов.
Эффективный подбор коэффициентов пропорциональности, интегральной и дифференциальной составляющих обеспечивает оптимальную работу ПИД-регулятора, гарантируя стабильность, точность и быструю реакцию системы на изменения входных сигналов.
Применение метода Ziegler-Nichols для первоначальной настройки ПИД регулятора
В этом разделе рассмотрим применение известного метода Ziegler-Nichols для начальной настройки системы регулирования с использованием ПИД регулятора. Этот метод позволяет определить оптимальные значения коэффициентов пропорциональности, интегральной и дифференциальной составляющих регулятора, чтобы достичь желаемой динамики и стабильности процесса.
| Шаг | Описание |
|---|---|
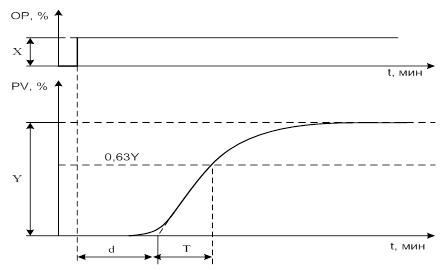
| 1 | Проведение самовызывающего испытания процесса |
| 2 | Анализ времени реакции процесса |
| 3 | Определение критического коэффициента усиления и периода колебаний |
| 4 | Вычисление оптимальных значений коэффициентов ПИД регулятора |
| 5 | Настройка регулятора с использованием полученных значений |
Метод Ziegler-Nichols основан на проведении испытания процесса, анализе его времени реакции и определении критического коэффициента усиления и периода колебаний. Эти параметры позволяют вычислить оптимальные значения коэффициентов ПИД регулятора, которые обеспечат необходимую стабильность и быстродействие системы.
После определения оптимальных значений, производится настройка ПИД регулятора, что позволяет достичь желаемых характеристик регулируемого процесса. Корректная настройка регулятора с использованием метода Ziegler-Nichols является важным этапом в разработке и оптимизации систем автоматического управления.
Мастерство настройки: раскрытие потенциала регулятора через технику «Частотный метод»
Частотный метод позволяет анализировать влияние различных частот на динамику системы и оптимально настраивать ПИД регулятор для достижения желаемой производительности и стабильности. Вместо традиционной настройки на базе статических параметров, таких как коэффициенты пропорциональности, интегральности и дифференциальности, частотный метод позволяет проводить анализ и оптимизацию на основе периодического воздействия различных частот.
Суть частотного метода заключается в том, чтобы исследовать отзыв системы на различные частоты и определить оптимальные параметры настройки для достижения желаемой динамики системы. Для этого используются методы частотной и амплитудной характеристики, которые позволяют установить частотные границы, на которых система работает наиболее эффективно и стабильно.
Применение техники «Частотный метод» требует определенных знаний и навыков, но позволяет достичь более точной и детальной настройки ПИД регулятора. При правильном применении этого метода можно значительно повысить эффективность работы системы, улучшить ее отклик на внешние возмущения и обеспечить стабильное регулирование в широком диапазоне условий.
Видео:
Рекомендуем:
 Классы защиты от поражения электрическим током: виды и преимущества
Классы защиты от поражения электрическим током: виды и преимущества
 Какую мощность способен выдержать электрический автомат — подробное руководство и советы
Какую мощность способен выдержать электрический автомат — подробное руководство и советы
 Принцип работы УЗО: схема подключения к сети трехфазного и однофазного автомата
Сила Ома. Как работает эта формула, и почему так важно разобраться в ней для современного мира?
Автоматы больше 100 ампер — важность, функции и применение в электротехнических системах
Принцип работы УЗО: схема подключения к сети трехфазного и однофазного автомата
Сила Ома. Как работает эта формула, и почему так важно разобраться в ней для современного мира?
Автоматы больше 100 ампер — важность, функции и применение в электротехнических системах
 Вентильный двигатель: конструкция, принцип работы, классификация, характеристики
Вентильный двигатель: конструкция, принцип работы, классификация, характеристики
 При касании проводов индикаторной отверткой загорается только одна фаза: в чем причина и как ее исправить?
Сечение многожильного провода — важность выбора правильного размера и его влияние на эффективность электрической сети
При касании проводов индикаторной отверткой загорается только одна фаза: в чем причина и как ее исправить?
Сечение многожильного провода — важность выбора правильного размера и его влияние на эффективность электрической сети
 Заземляющее устройство: пример выполнения для частного дома
Заземляющее устройство: пример выполнения для частного дома
 Выбор и необходимость блока питания для светодиодного светильника мощностью 36 Вт
Выбор и необходимость блока питания для светодиодного светильника мощностью 36 Вт
