Сервопривод – это электромеханическое устройство, которое используется для управления движением и положением объектов. Оно состоит из нескольких компонентов, включая электродвигатель, энкодер и контроллер. Сервоприводы широко применяются в различных системах и областях, таких как робототехника, автоматизированные производства, авиация и многое другое.
Устройство сервопривода основано на принципе отрицательной обратной связи. Когда сервопривод получает команду на изменение положения или скорости движения объекта, он сравнивает текущее положение с желаемым и корректирует свое действие, чтобы достичь требуемого положения. Это позволяет сервоприводу поддерживать стабильность и точность в работе.
Существует несколько различных видов сервоприводов, включая позиционные, скоростные и торковые. Позиционные сервоприводы используются для управления положением объекта и обычно имеют высокую точность позиционирования. Скоростные сервоприводы используются для управления скоростью движения, а торковые сервоприводы — для управления силой или моментом.
В целом, сервоприводы являются важным компонентом в многих технических системах и играют ключевую роль в обеспечении точности и управляемости движения объектов.
Сервопривод: устройство, принцип работы, виды
Сервопривод — это устройство, используемое для управления механизмами и обеспечения точного позиционирования. Оно состоит из электродвигателя, регулятора и обратной связи. Электродвигатель обеспечивает прецизионный движущий момент, регулятор контролирует его работу, а обратная связь обеспечивает информацию о фактическом положении механизма.
Принцип работы сервопривода основан на прецизионном управлении положением объекта. Регулятор сравнивает желаемое положение объекта с его фактическим положением, и если есть различия, выдает команды на работу электродвигателя. Обратная связь позволяет регулятору корректировать команды и достичь требуемого позиционирования.
Сервоприводы бывают разных типов, включая: роторные, линейные, поворотные, гибкие и вращательно-поворотные.
- Роторные сервоприводы применяются для вращения объектов вокруг оси.
- Линейные сервоприводы обеспечивают линейное перемещение объектов.
- Поворотные сервоприводы предназначены для поворота объекта на заданный угол.
- Гибкие сервоприводы обеспечивают гибкую передачу движения.
- Вращательно-поворотные сервоприводы позволяют осуществлять одновременное вращение и поворот объекта.
Сервоприводы широко применяются в автоматизированных системах, таких как промышленные роботы, автоматические станки и устройства с точным позиционированием. Они обеспечивают высокую точность и надежность при выполнении различных задач.
Устройство сервопривода
Сервопривод – это устройство, используемое для управления и контроля положения, скорости и угла поворота оборудования или механизма. Он состоит из нескольких основных компонентов, которые взаимодействуют между собой, чтобы обеспечить оптимальную работу системы.
Основными компонентами сервопривода являются: электродвигатель, редуктор, ротор, датчик положения, контроллер и управляющая электроника. Электродвигатель, как правило, представляет собой переменный токовый или постоянный токовый двигатель, который преобразует электрическую энергию в механическую.
Редуктор используется для уменьшения скорости вращения и увеличения крутящего момента от электродвигателя. Он позволяет более точно регулировать положение и движение механизма. Ротор является частью сервопривода, которая вращается под воздействием электрической силы.
Датчик положения служит для измерения и контроля положения ротора или механизма. Он передает информацию об угле поворота или положении в контроллер, который принимает решение о необходимых корректировках. Контроллер является ключевым компонентом сервопривода. Он обрабатывает сигналы от датчика положения и передает команды управляющей электронике, чтобы поддерживать желаемое положение механизма или оборудования.
Управляющая электроника отвечает за выполнение команд контроллера и предоставление необходимой энергии для работы сервопривода. Она может включать в себя требуемый блок питания, усилитель мощности и другие компоненты, необходимые для правильной работы устройства.
Сервоприводы используются в различных областях промышленности и автоматизации, таких как робототехника, станки с числовым программным управлением, системы позиционирования и другие. Они обеспечивают точное и стабильное управление движением, что позволяет достичь высокой эффективности и качества работы.
Мотор
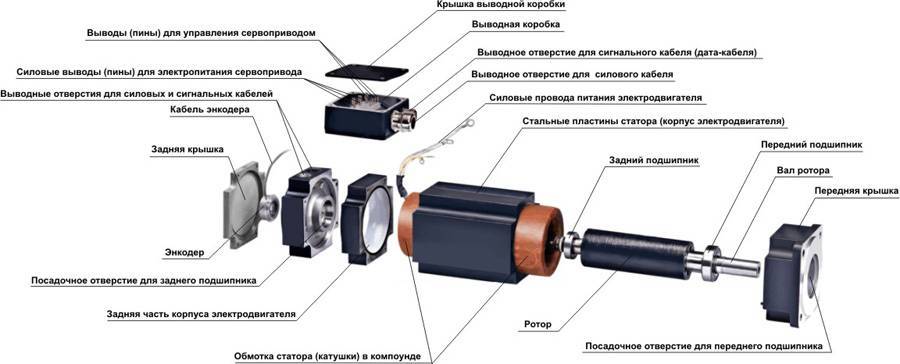
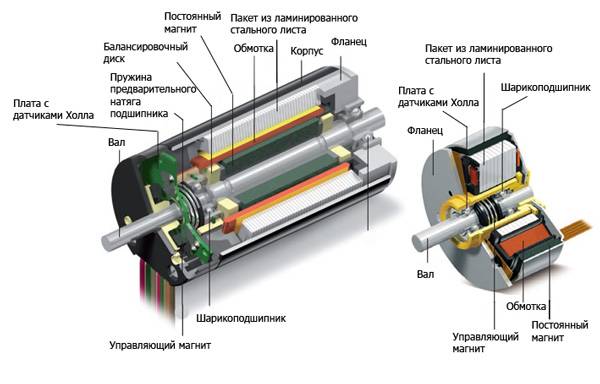
Мотор — это устройство, предназначенное для преобразования электрической энергии в механическую работу. Он состоит из двух основных частей: статора и ротора. Статор представляет собой неподвижную обмотку, в которой создается магнитное поле, а ротор — это вращающийся элемент, на который действует это поле.
Принцип работы мотора основан на явлении электромагнитной индукции. Когда через обмотку статора пропускается электрический ток, возникает магнитное поле. Это поле влияет на магнитные свойства ротора, вызывая его вращение. Таким образом, мотор преобразует электрическую энергию в механическую, что позволяет его использовать в различных устройствах и механизмах.
Существует несколько видов моторов, которые различаются по принципу работы и назначению. Наиболее распространенными являются постоянные моторы, которые работают от постоянного тока, и переменные моторы, которые работают от переменного тока. Кроме того, существуют шаговые моторы, которые применяются в системах позиционирования, и сервомоторы, которые отличаются высокой точностью управления и широким диапазоном скоростей.
Контроллер
Контроллер – это устройство, отвечающее за управление сервоприводом. Он принимает команды от пользователя или других устройств и передает их сервоприводу для выполнения определенной операции.
Контроллер обычно оснащен микроконтроллером, который выполняет программу управления. Он принимает сигналы от датчиков и анализирует их для определения текущего состояния системы. Затем контроллер генерирует соответствующие сигналы управления, которые передаются сервоприводу.
Основная функция контроллера – поддерживать заданные значения позиции, скорости и усилия сервопривода. Он может включать в себя различные алгоритмы и управляющие схемы для решения конкретных задач. Некоторые контроллеры также могут иметь функции обратной связи, чтобы обеспечить более точное управление сервоприводом.
Контроллеры сервоприводов могут быть различных типов в зависимости от их применения. Например, промышленные контроллеры используются для автоматизации производственных процессов, а контроллеры в робототехнике обеспечивают точное и гибкое управление движением роботов.
В общем, контроллер является важной частью системы управления сервоприводом. Он позволяет пользователям управлять движением и положением сервопривода с высокой точностью и надежностью. Разработка контроллеров этого типа является активным направлением в современной автоматизированной промышленности и робототехнике.
Обратная связь
Обратная связь – это механизм, позволяющий получить информацию о состоянии или результате действий и передать ее обратно к источнику. В контексте сервопривода обратная связь играет важную роль в поддержании точного положения и управлении устройством. Сервопривод получает данные о положении или скорости движения и, используя обратную связь, корректирует свою работу для достижения заданной цели.
Обратная связь в сервоприводах осуществляется с помощью датчика положения или энкодера. Датчик фиксирует положение выходного вала сервопривода и передает информацию об этом обратно к контроллеру. Затем контроллер анализирует полученные данные и может внести поправки в управляющий сигнал, чтобы достичь точности и стабильности работы.
Одним из преимуществ обратной связи в сервоприводах является возможность компенсации возможных возмущений в системе, например, нагрузки или изменения внешних условий. Благодаря обратной связи сервопривод может автоматически реагировать на изменения и поддерживать заданное положение или скорость движения.
Также обратная связь позволяет добиться высокой точности и повторяемости работы сервопривода. Поскольку устройство получает информацию о своем положении, оно может скорректировать свою работу и исправить любые ошибки или несоответствия. Это особенно важно в промышленных и автоматизированных системах, где каждое действие должно быть выполнено с высокой точностью.
Принцип работы сервопривода
Сервопривод — это устройство, которое используется для управления и контроля положения и скорости движения механических систем. Он состоит из двух основных компонентов: серводвигателя и контроллера.
Серводвигатель — это электрический двигатель, который используется для преобразования электрической энергии в механическую энергию. Он обычно состоит из ротора, статора и электромагнитных полюсов. Ротор преобразует электромагнитные поля в механическое движение, которое передается на управляемую механическую систему.
Контроллер сервопривода отвечает за управление положением и скоростью движения системы. Он принимает сигналы от внешних источников и дает команды серводвигателю в соответствии с этими сигналами. Контроллер может использовать обратные связи от серводвигателя, чтобы точно контролировать его положение и скорость. Он также может иметь различные настройки и режимы работы для оптимального выполнения конкретной задачи.
Одним из основных преимуществ сервопривода является возможность точного контроля положения и скорости движения системы. Он применяется во многих областях, включая промышленность, робототехнику, автоматизацию и управление движением.
Регулятор положения
Регулятор положения – это устройство, предназначенное для управления положением объекта. Это может быть как физическое тело, так и элемент системы виртуального пространства. Регулятор положения обеспечивает точное позиционирование объектов и контролирует их движение в соответствии с заданными параметрами.
Принцип работы регулятора положения основан на использовании обратной связи. Устройство контролирует текущее положение объекта и сравнивает его с желаемым положением. Затем, на основе полученной разницы, регулятор определяет необходимые действия для приближения фактического положения объекта к желаемому.
Существует несколько видов регуляторов положения. Одним из наиболее распространенных является пропорционально-интегрально-дифференциальный (ПИД) регулятор. Он основан на комбинации трех базовых компонентов: пропорциональной, интегральной и дифференциальной составляющих.
Пропорциональная составляющая регулятора обеспечивает выходной сигнал, пропорциональный разнице между желаемым и текущим положением. Интегральная составляющая учитывает накопленную ошибку позиционирования и корректирует выходной сигнал в зависимости от длительности этой ошибки. Дифференциальная составляющая представляет собой производную от разницы положений и используется для предотвращения колебаний и сглаживания работы регулятора.
Регулятор положения применяется во многих областях, где требуется точное позиционирование объектов. Это может быть робототехника, автоматизированные производственные линии, системы навигации и многие другие. Регулятор положения играет важную роль в обеспечении стабильности и точности работы таких систем.
Обратная связь и коррекция
Одной из ключевых функций сервопривода является обратная связь, которая позволяет устройству получать информацию о своем положении и скорости. Обратная связь обеспечивается с помощью датчиков, которые мониторят положение оси и передают эту информацию контроллеру сервопривода.
Используя информацию от датчиков, контроллер может сравнить текущее положение оси с желаемым положением и вычислить ошибку. На основе полученной ошибки контроллер принимает решение о том, как скорректировать работу сервопривода, чтобы достичь требуемого положения.
В зависимости от типа сервопривода и его применения, методы коррекции могут быть разными. Некоторые сервоприводы могут использовать пропорциональное управление, где коррекция осуществляется путем изменения скорости вращения оси. Другие сервоприводы могут применять интегральное или дифференциальное управление для улучшения точности и стабильности работы.
Обратная связь и коррекция в сервоприводах играют важную роль в достижении точности и стабильности работы устройства. Они позволяют сервоприводу адаптироваться к изменениям условий работы и компенсировать возможные помехи или деформации. Благодаря этому, сервоприводы широко применяются в различных областях, требующих высокой точности и надежности, таких как промышленная автоматика, робототехника, медицина и другие.
Видео:
Как проверить работу вентиляционного клапана
Принцип работы ПЛАНЕТАРНОЙ ПЕРЕДАЧИ
Рекомендуем:
 Как определить мощность танталовых SMD-конденсаторов по цветовой маркировке
Как определить мощность танталовых SMD-конденсаторов по цветовой маркировке
 Право РЭС на установку пломбы на коробку счетчика: закономерно или нет?
Право РЭС на установку пломбы на коробку счетчика: закономерно или нет?
 Принцип работы УЗО: схема подключения к сети трехфазного и однофазного автомата
Принцип работы УЗО: схема подключения к сети трехфазного и однофазного автомата
 Структурная схема АСУ ТП — Asutpp: основные принципы и преимущества
Структурная схема АСУ ТП — Asutpp: основные принципы и преимущества
 Инструмент для монтажа и ремонта электрики – необходимость для электрика. Как скомпоновать сумку для работы?
Инструмент для монтажа и ремонта электрики – необходимость для электрика. Как скомпоновать сумку для работы?
 Что делать, когда срабатывает УЗО без нагрузки? Решение проблемы
Что делать, когда срабатывает УЗО без нагрузки? Решение проблемы
 Нормы оснащения электромонтажника электроинструментом: где их найти?
Нормы оснащения электромонтажника электроинструментом: где их найти?
 Схемы подключения перекрестного выключателя: установка и принцип работы
Схемы подключения перекрестного выключателя: установка и принцип работы
 Принцип работы реле тока максимального и минимального: подробное объяснение и примеры
Принцип работы реле тока максимального и минимального: подробное объяснение и примеры
 Как правильно подключить УЗО схемы с заземлением и без
Как правильно подключить УЗО схемы с заземлением и без