Шаговый двигатель – это электромеханическое устройство, которое используется для преобразования электрического сигнала в механическое перемещение. Он состоит из статора и ротора, которые взаимодействуют друг с другом за счет магнитных полей.
Устройство шагового двигателя основано на явлениях электромагнетизма. Статор представляет собой укладку из обмоток, которые создают магнитное поле. Ротор – это цилиндр с намагниченными полюсами. Когда на обмотки статора подается электрический сигнал, создается перемещающее его магнитное поле, которое заставляет ротор двигаться.
Шаговые двигатели имеют различные типы. Наиболее распространены два типа шаговых двигателей – релятивные двигатели и нерелятивные двигатели. Релятивные двигатели обладают высоким крутящим моментом и позволяют достигать высоких угловых скоростей. Нерелятивные двигатели, в свою очередь, характеризуются линейной зависимостью углового перемещения от входного сигнала.
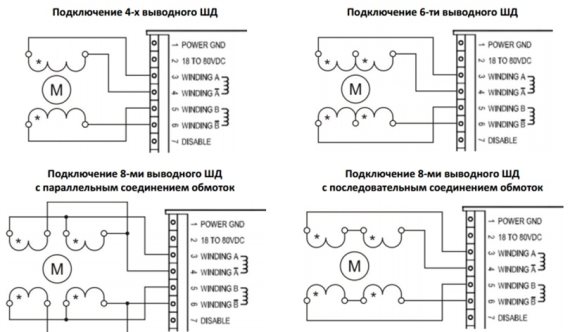
Существуют различные схемы подключения шаговых двигателей. Одна из самых распространенных схем – это двухфазная схема, которая использует две обмотки статора. Также существуют трехфазные схемы, которые позволяют повысить точность позиционирования и угловую скорость двигателя. Кроме того, шаговые двигатели могут быть подключены как параллельно, так и последовательно, чтобы достичь нужной силы и скорости движения.
Шаговые двигатели широко применяются в промышленности и автоматизации производства. Они используются в робототехнике, медицинском оборудовании, принтерах, 3D-принтерах, CNC-машинках и других устройствах, где требуется точное и контролируемое перемещение.
Итак, шаговый двигатель – это надежное и универсальное устройство, которое широко применяется во многих областях техники. Знание его устройства, принципа работы, типов и схем подключения позволяет эффективно использовать этот двигатель для решения различных задач, требующих точного позиционирования и движения.
Устройство шагового двигателя
Шаговой двигатель — это электромеханическое устройство, которое преобразует электрический сигнал в механическое вращение. Одним из важных принципов работы шагового двигателя является шаговое перемещение, то есть его вращение происходит с определенным числом шагов и угловым перемещением на каждом шаге. Устройство шагового двигателя позволяет точно контролировать его положение и поворот, что делает его особенно полезным во многих приложениях.
Шаговой двигатель состоит из ротора и статора. Ротор представляет собой набор зубцов, образующих магнитное поле. Статор содержит намагниченные обмотки, которые создают магнитное поле, взаимодействуя с зубцами ротора. При подаче электрического тока на обмотки, ротор начинает вращаться на определенный угол, который зависит от количества шагов двигателя.
Устройство шагового двигателя может быть разных типов в зависимости от конструкции ротора и статора. Один из наиболее распространенных типов шаговых двигателей — гибридный. Он сочетает в себе особенности релятивистского и постоянного магнита, что обеспечивает высокую производительность и точность позиционирования.
Для подключения шагового двигателя используются различные схемы, такие как последовательная и параллельная схемы подключения. В последовательной схеме две фазы подключаются последовательно, что позволяет достичь высокой точности вращения. В параллельной схеме каждая фаза подключается параллельно, что обеспечивает высокую скорость вращения. Выбор схемы подключения зависит от требований конкретного приложения.
В заключение, устройство шагового двигателя представляет собой электромеханическое устройство, которое с помощью электрического сигнала осуществляет шаговое перемещение и точное позиционирование. В зависимости от конструкции и типа подключения, шаговые двигатели могут быть эффективными и надежными во многих приложениях. Их использование позволяет реализовать точное и плавное движение в различных системах и устройствах.
Электромагниты
Электромагниты — это устройства, которые создают магнитное поле при прохождении через них электрического тока. Они широко используются в различных сферах, включая промышленность, электронику и медицину.
Принцип работы электромагнитов основан на взаимодействии магнитного поля и электрического тока. Когда электрический ток проходит через катушку электромагнита, образуется магнитное поле с определенной силой и направлением.
Приложение электрического тока к электромагниту возможно благодаря наличию проводников, из которых состоит катушка, обмотка или сердечник. В зависимости от конструкции электромагнита, его возможно использовать для притяжения или отталкивания металлических предметов, создания сигналов или вращения механических устройств.
Электромагниты имеют различные типы схемы подключения, которые определяются конкретной целью использования. Они могут быть подключены к постоянному и переменному току, а также использоваться в сочетании с другими электрическими компонентами, такими как реле или транзисторы.
- Простая схема подключения электромагнита включает только его обмотку и источник питания. В этом случае электромагнит будет притягивать или отталкивать металлические предметы в зависимости от направления тока.
- Более сложные схемы подключения электромагнитов могут включать использование реле или транзисторов для управления током, что позволяет создавать различные сигналы и контролировать движение механизмов.
Для более эффективного использования электромагнитов часто используется сердечник — материал, который увеличивает магнитное поле, создаваемое электромагнитом. Некоторые типы сердечников могут быть магнитопроводящими или ферромагнитными, что увеличивает силу и направленность магнитного поля.
В заключение, электромагниты основаны на принципе взаимодействия электрического тока и магнитного поля. Они имеют различные типы схемы подключения и используются во множестве областей для создания сигналов, управления устройствами и выполнения других функций.
Ротор и статор
Шаговый двигатель состоит из двух основных частей — ротора и статора. Ротор представляет собой подвижную часть двигателя, которая вращается под воздействием электромагнитных полей, создаваемых статором. Статор — это неподвижная часть двигателя, в которой размещены обмотки с постоянными магнитами. Ротор и статор тесно взаимодействуют друг с другом, обеспечивая работу двигателя.
Ротор шагового двигателя может иметь различные конструкции, такие как одношаговый, двухшаговый или многошаговый. Одношаговый ротор состоит из одной секции с обмоткой, которая периодически взаимодействует с электромагнитами статора. Двухшаговый ротор состоит из двух секций, соединенных между собой. Каждая секция взаимодействует с отдельным электромагнитом статора. Многошаговый ротор имеет большее количество секций, что позволяет увеличить точность и плавность движения двигателя.
Статор состоит из обмоток, в которых протекает электрический ток. При подаче тока на обмотку, электромагнитное поле создается вокруг нее. Когда ротор находится рядом с обмоткой, взаимодействие этих полей приводит к возникновению силы, которая вращает ротор. При изменении направления тока в обмотке, изменяется и направление поля, что позволяет изменять направление вращения ротора.
Ротор и статор являются основными элементами шагового двигателя и определяют его работу и характеристики. Различные типы роторов и статоров позволяют создавать шаговые двигатели с разной мощностью, скоростью и точностью движения. Они находят широкое применение в различных устройствах, где требуется точное позиционирование и контроль движения.
Коммутатор
Коммутатор – это устройство, используемое для управления и пересылки данных в сети передачи данных. Работает на уровне канала модели OSI и выполняет функцию коммутации кадров или пакетов данных.
Основная задача коммутатора – маршрутизация данных между различными узлами сети. Он анализирует адреса назначения входящих фреймов и перенаправляет их в соответствующие порты, что позволяет доставлять данные только нужным устройствам и снижает загрузку сети.
Существует несколько типов коммутаторов в зависимости от способа коммутации данных. Наиболее распространеными являются коммутаторы на основе кольцевой или звездной топологии сети. Коммутаторы также могут быть управляемыми или неуправляемыми, что определяет степень контроля и настройки, которую имеет администратор сети.
Для подключения устройств к коммутатору используются порты, которые могут быть различных типов. Например, Ethernet-порты используются для подключения компьютеров, а SFP-порты – для подключения оптических модулей.
Принцип работы шагового двигателя
Шаговый двигатель представляет собой электромеханическое устройство, которое используется для преобразования электрического сигнала в механическое движение. Он состоит из ротора и статора, а также некоторых дополнительных элементов.
Принцип работы шагового двигателя заключается в том, что электрический сигнал, поступающий на обмотки статора, создает магнитное поле. Ротор двигателя, который находится внутри статора, имеет намагниченные полюса. Взаимодействие магнитного поля статора и полюсов ротора приводит к последовательному перемещению ротора, шаг за шагом.
Шаговые двигатели могут быть одношаговыми или многошаговыми. В одношаговом двигателе ротор перемещается на один шаг за один цикл сигнала. В многошаговых двигателях ротор может перемещаться на несколько шагов за один цикл сигнала, что обеспечивает более точное и плавное движение.
Для правильного функционирования шагового двигателя необходимо управлять последовательностью включения обмоток статора. Это можно сделать с помощью специальной электроники. Различные схемы подключения обмоток позволяют выбрать необходимую последовательность шагов для определенного движения.
Применение шаговых двигателей широко варьируется, их можно встретить в таких областях, как промышленность, робототехника, автотранспорт и другие. Они обладают высокой позиционной точностью, отличаются низкими требованиями к управлению и имеют простую конструкцию, что делает их популярным выбором для многих приложений.
Импульсное управление
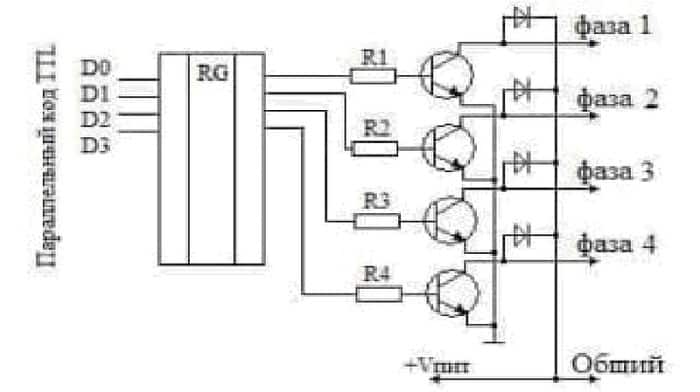
Импульсное управление – это метод управления шаговыми двигателями, основанный на отправке импульсов для перемещения вала на определенное количество шагов. Для этого используется специальная электронная схема, которая генерирует и отправляет импульсы с определенными характеристиками.
Для импульсного управления шаговым двигателем необходим генератор импульсов, который формирует последовательность импульсов с заданными параметрами. Таким образом, шаговый двигатель получает команды на перемещение и выполняет их с заданной точностью. Чем больше количество импульсов, тем больше шагов изначально пройдет двигатель.
Импульсное управление позволяет получить точное и плавное перемещение шагового двигателя. Для этого используется специальная рабочая схема, которая управляет подачей импульсов. С помощью этого метода можно изменять скорость и направление движения, а также добиться высокой точности позиционирования.
Одна из схем импульсного управления – двухфазное управление. Она представляет собой последовательность сигналов, которые синхронизируют двигатель и обеспечивают его перемещение на заданное количество шагов. Данный способ особенно широко применяется в промышленности, в робототехнике, в системах автоматизации.
Полношаговый режим
Полношаговый режим — это один из режимов работы шагового двигателя, при котором каждая фаза витка обмотки активируется последовательно для создания полного шага. В данном режиме, в каждом положении ротора, мотор занимает одну из шести возможных позиций с одним погибом на каждом витке обмотки.
Для передвижения шагового двигателя в полношаговом режиме, необходимо следить за последовательностью активации фаз витка обмотки. Обычная последовательность состоит из шести шагов, где каждый шаг активирует одно из пяти фаз витка обмотки или остается в состоянии покоя. Для облегчения понимания последовательности активации фаз обмотки, используется таблица, в которой указан порядок включения фаз для каждого шага.
В полношаговом режиме шаговый двигатель работает с наибольшей точностью, но потребляет больше энергии по сравнению с другими режимами. Применение данного режима может быть полезным, если требуется высокая точность позиционирования или небольшая скорость вращения.
Микрошаговый режим
Микрошаговый режим — это особый режим работы шагового двигателя, в котором он может перемещаться с большей точностью и плавностью. В отличие от обычного полношагового режима, где каждый шаг двигателя состоит из полных шагов, в микрошаговом режиме каждый шаг разбивается на меньшие шаги.
Для работы в микрошаговом режиме необходима особая схема контроллера, которая может обеспечить плавное изменение направления и скорости движения. В микрошаговом режиме шаговый двигатель может совершать до нескольких сотен микрошагов на один полный шаг.
Микрошаговый режим позволяет достичь более высокой точности позиционирования и более плавного движения. Это особенно важно в приложениях, где требуется высокая точность и минимальные вибрации. Например, микрошаговые двигатели широко применяются в принтерах, плоттерах и других подобных устройствах.
Однако следует отметить, что микрошаговый режим требует большего количества вычислительных ресурсов и более сложной логики управления. Также микрошаговый режим может иметь меньшую максимальную скорость и момент двигателя по сравнению с полношаговым режимом. Поэтому при выборе режима работы шагового двигателя необходимо учитывать требуемую точность и требования к динамике движения.
Типы шаговых двигателей
Шаговые двигатели часто применяются в различных устройствах, требующих точного перемещения. Существует несколько типов шаговых двигателей, каждый из которых имеет свои особенности и преимущества.
- Одношаговые двигатели. Этот тип шаговых двигателей состоит из одной обмотки, которая создает магнитное поле для перемещения ротора. Одношаговые двигатели обладают простой схемой подключения и низкой стоимостью, однако они имеют низкую точность и момент.
- Двухшаговые двигатели. Двухшаговые двигатели имеют две обмотки, которые создают магнитные поля для перемещения ротора. Они обладают более высокой точностью и моментом, чем одношаговые двигатели, но требуют более сложной схемы подключения.
- Гибридные двигатели. Гибридные двигатели объединяют в себе преимущества одношаговых и двухшаговых двигателей. Они имеют более высокую точность и момент, чем одношаговые двигатели, при этом они также обладают простой схемой подключения.
Выбор типа шагового двигателя зависит от конкретного применения и требований к точности и мощности устройства. Кроме того, стоит учитывать стоимость и сложность схемы подключения. Важно подобрать оптимальный тип двигателя для каждой конкретной задачи.
Одношаговый шаговый двигатель
Одношаговый шаговый двигатель — это тип шагового двигателя, который переходит между состояниями шаг за шагом, при этом выполнение каждого шага происходит в определенном порядке. Одношаговые шаговые двигатели являются наиболее простыми и широко используются во многих устройствах.
Принцип работы одношагового шагового двигателя основан на использовании электромагнитов, которые, переключаясь под влиянием электрического тока, приводят в движение роторы или валы. Каждое состояние двигателя соответствует определенному углу поворота вала и задается последовательностью включения электромагнитов.
Одношаговые шаговые двигатели имеют разные типы схем подключения. Наиболее распространенной и простой схемой является параллельная схема подключения, в которой каждый из фаз имеет свой индивидуальный контур и электрический путь до источника питания. Другой тип схемы — последовательная, где каждая фаза подключена поочередно к общему пути, что позволяет более эффективно использовать электрическую энергию.
Одношаговые шаговые двигатели широко применяются в различных областях, таких как принтеры, сканеры, робототехника, автоматизированные системы. Они обладают высоким разрешением и точностью позиционирования, что делает их незаменимыми в задачах требующих плавного и точного перемещения.
Видео:
Принцип работы шагового двигателя на примере Nema 17/ ШД HS4401
Обзор и подключение сервоприводов с простой настройкой.
Рекомендуем:
 Изготовление mimo антенн 4g lte своими руками в домашних условиях
Изготовление mimo антенн 4g lte своими руками в домашних условиях
 Как самостоятельно отремонтировать стабилизатор напряжения
Как самостоятельно отремонтировать стабилизатор напряжения
 Как правильно подключить УЗО схемы с заземлением и без
Как правильно подключить УЗО схемы с заземлением и без
 Методы расчета сечения провода для подачи энергии на дальнее расстояние
Методы расчета сечения провода для подачи энергии на дальнее расстояние
 Переделка шуруповертов на литиевые аккумуляторы 18650: простой способ увеличить емкость и продолжительность работы
Переделка шуруповертов на литиевые аккумуляторы 18650: простой способ увеличить емкость и продолжительность работы
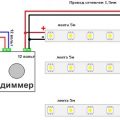 Подключение диммера для освещения: примеры схемы и советы
Подключение диммера для освещения: примеры схемы и советы
 Какой стабилизатор напряжения выбрать: релейный или электромеханический?
Какой стабилизатор напряжения выбрать: релейный или электромеханический?
 Экономичные и эффективные решения для реконструкции электроснабжения объектов
Экономичные и эффективные решения для реконструкции электроснабжения объектов
 Как безопасно установить электрическую проводку на кухне: подробная пошаговая инструкция
Как безопасно установить электрическую проводку на кухне: подробная пошаговая инструкция